Programming My Vex IQ
Moving Forward: This was the first challenge where you had to make the robot stop at the line, pause for a second, then go to the next line.
{kind=link}
Turning: You had to maneuver the robot around the lines ne not touch the lines.
{kind=link}
Touch Sensor: The robot had to hit the block with its bumper sensor, back up, then pick up the block.
{kind=link}
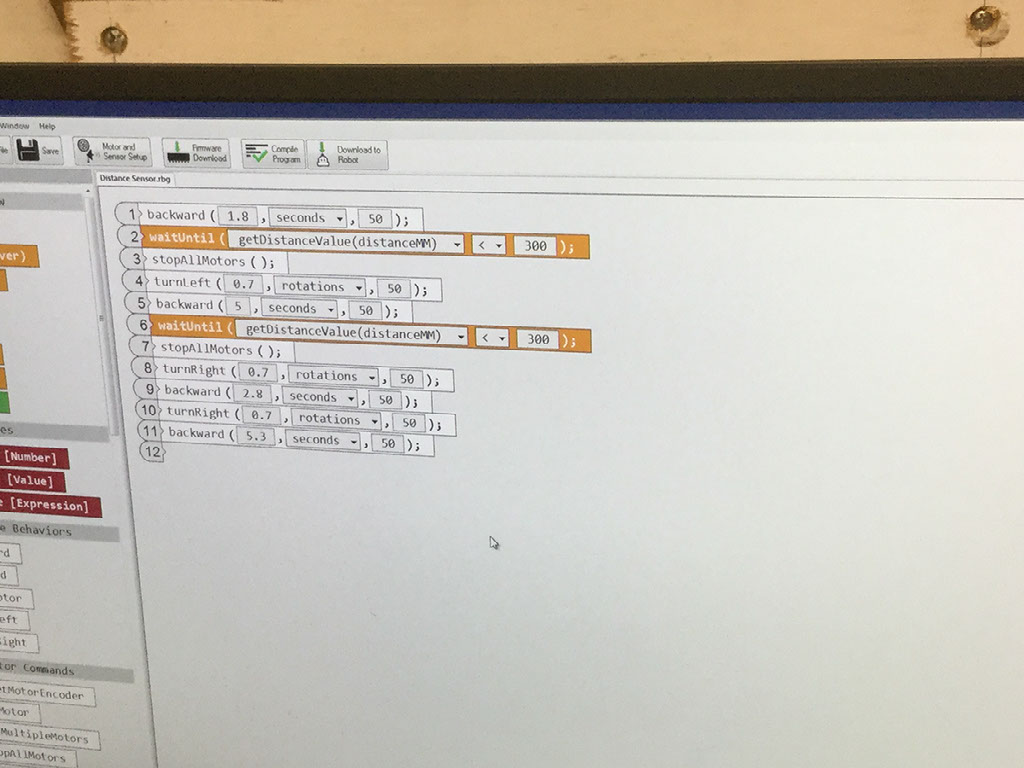
Distance Sensor: The robot had to sense the walls with it's distance sensor and get to the end without bumping into anything.
{kind=link}
Gyro Illinois: The robot had to sense the lines and turn the right amount with its Gyro Sensor.
{kind=link}
{kind=link}
Color Sensor: The robot had to sense the color of the block. If it saw a red block, it would stop. If it saw a green block, it would go.
{kind=link}
Loops: The robot had to use its distance sensor to detect a block, grab it, then bring it back to the starting point. It did this 4 times.
{kind=link}
If/Else: If the robot sensed a green block, it would bring it to the "not strawberries" side. If it sensed a red block, it would bring it to the "strawberries" side.
{kind=link}
Repeated Decisions: This Challenge was on the sma course as the turning Challenge. The only difference was that the robot would stop when it sensed a block, and go when the block was taken away. The distance sensor was used.